
飞控系统
飞控系统又称飞行控制系统,通过高效的控制算法内核,能够精准地感应并计算出飞行器的飞行姿态等数据,再通...

无人机分类
如何区分飞行器? 自1903年莱特兄弟的飞机成功飞行,飞机的发展已经有百年的历史,在这百年内飞行器快速发...

无刷电机的使用维护
1、避免无刷电机长期工作在高温环境 电机长期处于100摄氏度以上的高温环境,将对无刷电机的各个系统造成损...

什么是四轴六轴八轴
四旋翼是结构简单、飞行效率相对高效的一种常见多旋翼结构,也是目前市场上保有量最大的多旋翼飞行器类型。...
什么是无刷电机
无刷直流电机简称为无刷电机,英文Brushless DC motor,简称BLDC,多旋翼无人飞行器常用的是三相无刷外转子...
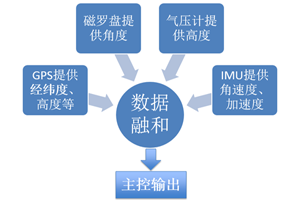
什么是组合导航控制
组合导航,是指将GPS、磁罗盘、气压计等系统中的一个或几个与IMU惯性测量单元集合在一起,形成的综合导航系...

无刷电机的尺寸以及功率
电机能够安全工作的最大功率,电机的功率反应了其对外的输出能力,功率越大的电机其输出能力也更强。关于功...

充电器的使用与维护
1、在一定范围内,充电倍率越大,电池可充进的电量会稍降低。例如同样一块2000mAh电池,使用1C充电可充进18...

磁罗盘的作用及使用注意事项
磁罗盘在多旋翼飞行器当中的作用也是一样的,负责为飞行器提供方位,也是属于飞行器的传感器。磁罗盘是飞行...

低温对锂电池放电的影响
环境温度对于飞行器的影响,主要是改变聚合物锂电池的充放电性能,锂聚合物电池属于化学电池,其充放电过程...

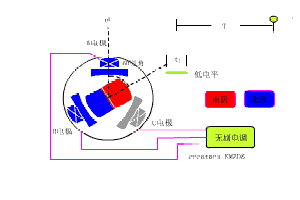
多旋翼无人机的控制系统
无人机地面站也称控制站,在规模较大的无人机系统中,可以有若干个控制站,这些不同功能的控制站通过通信设...

多旋翼无人机的链路系统
链路通讯系统主要用于多旋翼飞行器系统传输控制和载荷通讯的无线电链路,是飞行器与地面操纵人员之间沟通的...

多旋翼无人机的三种飞行模式
多旋翼飞行器系统一般提供三种飞行模式,它们操作的难易度从高到低分别是GPS模式、姿态模式和手动模式。 1...

多旋翼无人机电力巡线
多旋翼无人飞行器在电力方面的应用首先是电力架线,以往进行电力架线,往往是在相隔几百米的山头,这几百米...

多旋翼无人机动力系统构成
多旋翼飞行器的动力系统由电池、充电器(地面设备)、电子调速器、电机、螺旋桨等构成。螺旋桨是最终产生升...

多旋翼无人机发展历史(1)
在前面的章节我们已经介绍过,多旋翼飞行器是一种不稳定的飞行系统,其无法实现自稳。所以,其对飞行自稳系...

多旋翼无人机发展历史(2)
20世纪90年代之后,随着微机电系统(MEMS, Micro-Electro-Mechanical System)研究的成熟,重量只有几克的M...

多旋翼无人机飞控系统构成
飞行控制系统通过高效的控制算法内核,能够精准地感应并计算出飞行器的飞行姿态等数据,再通过主控制单元实...

多旋翼无人机机架的主要参数
机架的重量应当是在保证机身坚固性的前提下更轻为最佳,因为这可以降低机身负载,提升飞行器的续航时间。 ...

多旋翼无人机控制原理
以四旋翼飞行器为例,飞行原理如下图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此飞...

Copyright © 2026 慧飞无人机应用技术培训中心![]() 和慧飞是大疆创新的商标
和慧飞是大疆创新的商标

