
多旋翼无人机螺旋桨的主要参数
螺旋桨的主要参数包括长度、螺距,一款螺旋桨的命名也是根据这两个因素进行命名的,例如MG-1所用的21*7螺旋...
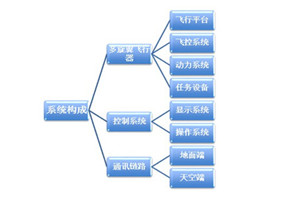
多旋翼无人机系统构成
多旋翼无人飞行器系统主要由飞行器平台(机架)、飞控系统、动力系统、任务设备、显示系统、控制系统、通讯...

多旋翼无人机植保作业的优势
农业植保机已经广泛应用在农作物植保,同时,可利用无人机进行低空农田信息采集,可以准确清晰地获得农田信...
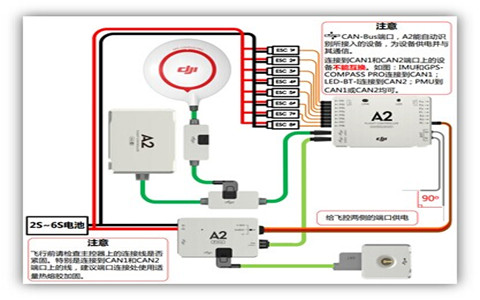
飞控系统的连接
整个系统的连接,我们以大疆创新的A2飞控为例,IMU以及GPS整合汇入主控;PMU一侧连接主电源,一侧连接主控...
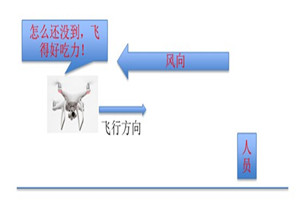
风向对无人机操作的影响
风向从来都是飞行器飞行的重要影响因素,逆风飞行将降低飞行器的飞行速度,而顺风飞行恰恰相反。有较大的侧...

三种无人机平台的性能差别
在续航和载重方面,固定翼无人机可以以较低功率进行巡航,而旋翼类无人机螺旋桨产生的升力必须一直大于或等...

拉力以及推重比
该电机在最大功率下所能产生的最大拉力,也直接反应了电机的功率水平。多旋翼飞行器要求其所有电机总推力必...

锂电池充电器的基本参数
输入电压完整的锂电池平衡充电器其内部应至少含有两部分,一部分为交流转直流并降压电路,一路为平衡充电电...

锂电池的使用及维护
注意,锂聚合物电池性能总体相对“娇嫩”,必须严格按照正确的方法进行使用和维护,否则容易产生鼓包膨胀,...

锂聚合物电池的基本概念及参数
锂聚合物电池,英文LI—polymer,简称LIPO,是一种能量密度高、放电电流大的新型电池。同时,锂电池使用起...

什么是IMU惯性导航单元
包含加速度计、角速度计和气压高度计,是高精度地感应飞行器姿态、角度、速度和高度的传感器集合体,在飞行...

什么是X型多旋翼
作为多旋翼中最基础也是最常见的气动布局,由于其优异的性能与简单的结构,深受众多多旋翼爱好者的喜爱。 X...

什么是磁罗盘
整个地球是拥有磁场的,类似常见的磁铁所形成的完整磁场。地球磁场,近似于把一个磁铁棒放到地球中心,N极...

什么是电机的KV值
KV的概念是指无刷电机工作电压每提升1V无刷电机所增加的转速。以往的直流电机我们在介绍其性能时,会举例其...

什么是美国手及日本手
在了解多旋翼飞行器的操作方式之前,我们先对遥控器进行一下了解.遥控器的左右两侧各有一个摇杆,摇杆处在...
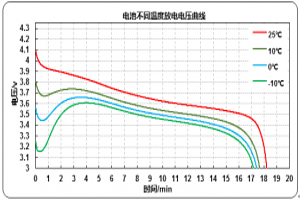
冬季电池注意事项
伴随冬季的来临,气温的下降,冬季的飞行需要格外的注意。由于近期有用户遇到各种冬季飞行的问题,如电压骤...

航拍起源
航空摄影始于19世纪50年代,纳达尔是首位实现航拍的摄影师和气球驾驶者,于1858年在法国巴黎上空拍摄。当时...
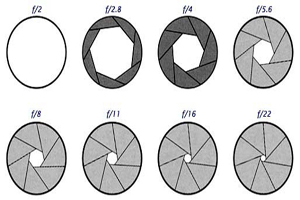
光圈
光圈的大小是相机镜头中控制光线的参数。说得直白一些,光圈的大小将决定光线穿过镜头的多少。光圈越大其透...

快门
快门的速度是拍摄照片时控制曝光时间长短的参数。为了让大家更容易理解,我们也可以把快门说成是让相机保持...

感光度
感光度是胶片对光线的化学反应速度。数码相机的感光度是一种类似于胶卷感光度的一种指标。在数字语境下的感...

Copyright © 2026 慧飞无人机应用技术培训中心![]() 和慧飞是大疆创新的商标
和慧飞是大疆创新的商标

